Image

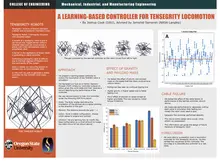
Tensegrity robots present a viable approach to explorations of foreign planetary bodies. These networks of tension and compression members are robust to various forms of of failure which makes them suitable for hazardous missions where local failures are likely. These structures can be manipulated to change their shape to allow locomotion across planetary surfaces. Designing a locomotive controller for a tensegrity system is challenging due to the high non-linearity of the system and the high degrees of freedom. In this work we propose a learning based solution to train a controller for TANDEM, a complex tensegrity rover. Our method trains a controller that learns which pairs of cables to extend and contract to move towards a goal. We verified the robustness of this controller and show that it is able to move the rover quickly and efficiently, reaching speeds of 2.5 meters per second, while also moving towards a goal location.